King Abdullah University of Science and Technology, Ecole de technologie supérieure
5a. Résumé
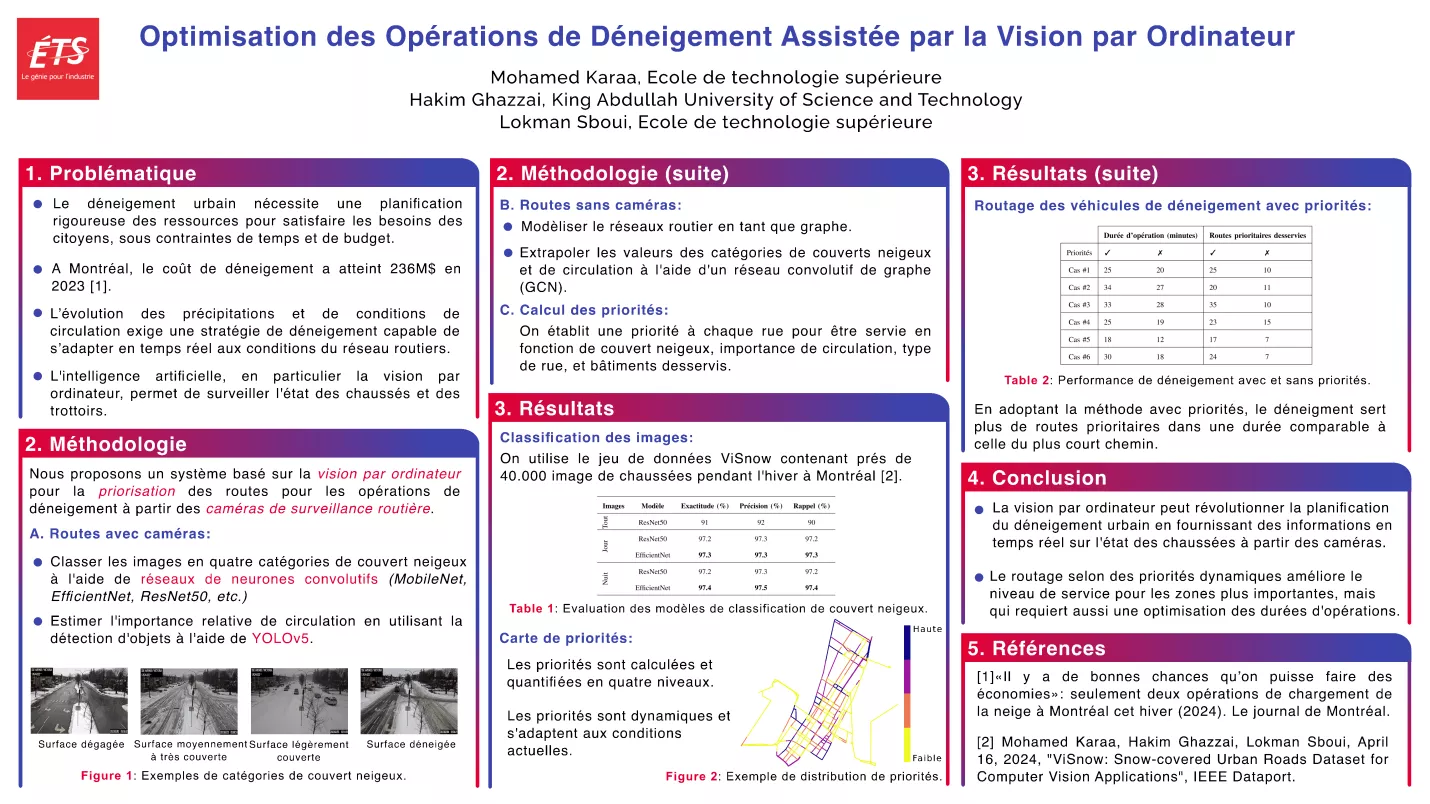
Le déneigement urbain est une tâche importante pour assurer la sécurité et la mobilité continue pendant l’hiver. La complexité du réseau routier et les variations des activités et des conditions climatiques imposent une planification plus rigoureuse des opérations et des ressources. Nous étudions l’utilisation des images des caméras de surveillance routière pour assister la planification des opérations de déneigement grâce à des prédictions sur l’état de la chaussée et de la circulation.
Dans un premier temps, nous recueillons un large ensemble de données d’images routières de la ville de Montréal pendant l’hiver. Nous avons développé un outil d’annotation basé sur l’apprentissage profond pour attribuer à chaque image une étiquette décrivant l'état de la chaussée en fonction du niveau de neige. Les images des caméras sont classées à l'aide d'un modèle entraîné sur le jeu de données collecté, et l'état de circulation est estimé en comptant les véhicules présents. Pour les rues sans caméras, un modèle d'apprentissage de graphe estime les informations manquantes. Nous combinons ces données avec des informations du réseau routier pour établir des priorités de déneigement. La planification du déneigement est effectuée de manière à ce qu'un plus grand nombre de routes prioritaires soient déneigées en premier. Cette approche assistée par la vision par ordinateur permet également une meilleure qualité de service pour la mobilité des véhicules.
Connexion requise
Pour ajouter un commentaire, vous devez être connecté.