Yassine Ainouche, Alexandre Auffray, Félix Auger, Léo Croufer, Maxime Landry, Adam Trudel
Polytechnique Montréal
5a. Résumé
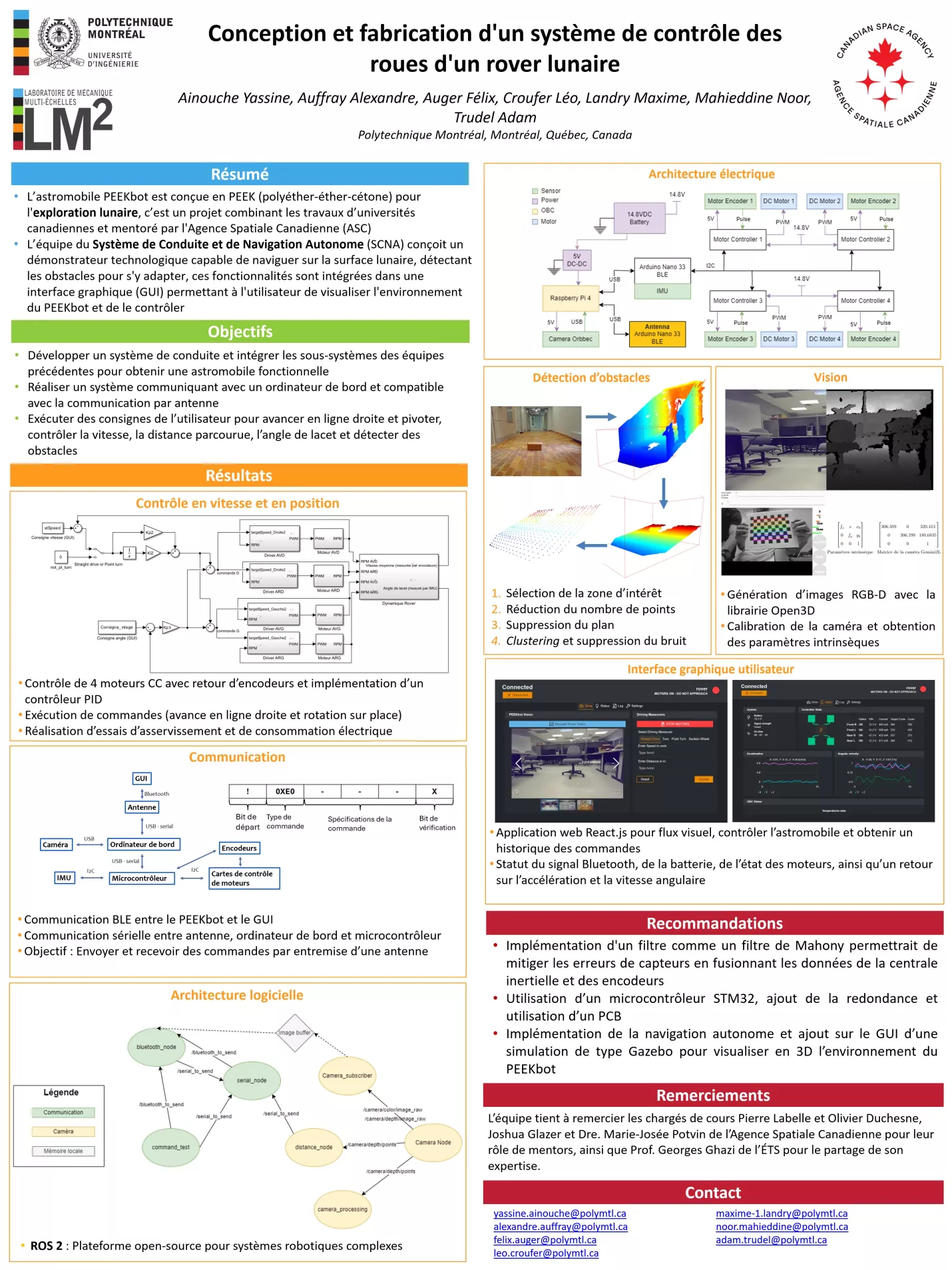
L'astromobile PEEKbot est un projet de recherche supervisé par l'ASC, axé sur le développement d'une nouvelle génération d'astromobiles canadiens en composites, plus légers que leurs prédécesseurs et alimentés exclusivement par des panneaux solaires. L'équipe du Système de Conduite et de Navigation Autonome (SCNA) de Polytechnique Montréal oeuvre à l'achèvement du projet de conduite de l'astromobile et à l'intégration de différentes composantes. Initié en 2018, le projet PEEKbot devrait se conclure au printemps 2024. L'équipe se concentre sur la conception d'un démonstrateur technologique capable de naviguer de manière autonome sur la surface lunaire, en détectant les pentes et les obstacles à l'aide d'une caméra stéréoscopique pour s'y adapter. Un système d'extraction est également prévu en cas d'enlisement d'une roue dans le régolithe lunaire ou de blocage sur un obstacle. L'utilisateur peut visualiser l'environnement du PEEKbot et le contrôler via une interface graphique intégrant ces fonctionnalités. Le projet innove dans l'architecture électrique et logicielle, combinant le contrôle et
l'asservissement semi-autonome du rover à la reconstruction numérique de la surface de l'environnement. Cette approche permet au PEEKbot d'accomplir sa mission en terrain inhospitalier malgré les délais de communication. Les compétences développées dans la conception d'astromobiles (semi) autonomes peuvent être exploitées pour des missions futures, qu'elles soient lunaires ou martiennes.
Connexion requise
Pour ajouter un commentaire, vous devez être connecté.