
Informations générales
Événement : 92e Congrès de l'Acfas
Type : Domaine
Section : Section 200 - Sciences naturelles, mathématiques et génie
Description :Vous trouverez ici les communications libres du domaine Techniques, mesures et systèmes. Dès le 28 avril 2025, vous pourrez voir les contributions en cliquant sur le bouton éponyme. Connectez-vous à votre compte utilisateur si vous souhaitez laisser un commentaire ou poser une question.
Dates :- Gauthier Alfonsi (Acfas)
Programme
Toute la semaine
Techniques, mesures et systèmes
-
Communication orale
Assemblage robotisé assisté par métrologie 3DWilliam Babin (ÉTS - École de technologie supérieure), Souheil-Antoine Tahan (ÉTS), Ahmed Joubair (ÉTS)▶ Vidéo
L’assemblage avec gabarit est un processus coûteux surtout dans le contexte de pièces produites en petite série ou de pièces à large volume. L’avancée des outils de mesure 3D sans contact permet d’obtenir des informations sur la position et l’orientation des pièces en temps quasi réel, dans l’environnement de production. L’utilisation de ces données pour automatiser des tâches d’assemblage précis permet d’accroître la flexibilité des chaînes de production et de réduire les délais. On parle donc d’assemblage assisté par métrologie 3D.
Les capacités en matière de précision et de répétabilité (de position et d’orientation) de ces types d’assemblages robotisés ne sont pas bien maîtrisées. Il est donc essentiel de les étudier et estimer pour permettre leur déploiement dans l’industrie. Les chaînes d’incertitudes complexes de ces systèmes ne permettent pas leur analyse par les méthodes traditionnelles de propagation d’incertitudes.
Cette étude présente le développement d’un banc de tests utilisant la technologie iGPS (Indoor Global Positioning System) comme instrument de mesure externe, pour positionner et orienter une pièce manipulée par un robot industriel, sans faire recours à un gabarit. Les résultats expérimentaux présentés permettent de quantifier l’incertitude de positions et d’orientation en précision et répétabilité du procédé robotisé d’assemblage.
-
Communication orale
Caractérisation de la sensibilité d'un biocapteur électronique utilisant le système CRISPR/Cas12 à détecter des mutations ponctuelles dans le gène PIK3CAJade Cimmino (UdeM - Université de Montréal), Jeanine Looman (Université de Montréal), Claudia Bazan (Université de Montréal), Delphine Bouilly (Université de Montréal)▶ Vidéo
Le cancer est une maladie génétique due à l'accumulation de mutations dans des gènes clés, comme PIK3CA, régulant des processus cruciaux tels que la division cellulaire et l'apoptose. Des mutations dans PIK3CA sont observées dans plusieurs cancers et sont associées à une résistance accrue aux traitements. La détection des mutations est donc importante pour personnaliser les thérapies. La PCR est la méthode la plus utilisée pour la détection, mais elle est coûteuse et lente. Pour surmonter ces limites, des alternatives sont en développement, notamment l'utilisation de la protéine Cas12a, qui peut détecter et cliver une séquence d'ADN cible. De plus, les transistors à base de graphène (GFETs) permettent une détection électrique sensible des charges proches du graphène. Mon projet vise donc à combiner ces deux approches afin de développer un biocapteur capable de détecter les mutations de PIK3CA. Pour cela, des brins d'ADN négatifs sont fixés à la surface des GFETs, puis la Cas12a, munie d'une séquence guide contre le gène PIK3CA muté, ainsi que le génome d'un patient, sont ajoutés en solution près du graphène. Si la Cas12a trouve dans le génome sa séquence d'intérêt, elle s'active et clive les ADN fixés au graphène, entraînant une diminution des charges négatives à proximité du graphène, et donc un changement dans la conductivité du biocapteur. Mon biocapteur offre une méthode de détection rapide, économique et applicable dans des environnements où les ressources sont limitées.
-
Communication orale
Création d’un catalogue de modèles numériques de colonnes vertébrales cervicales pour les simulations biomédicales de traumatismes et la conception de prothèsesLucien Diotalevi (ÉTS - École de technologie supérieure), Julien Clin (Numalogics Inc.), Bahe Hachem (Numalogics Inc.), Franck Le Naveaux (Numalogics Inc.), Marie-Hélène Beauséjour (École de technologie supérieure), Pauline Léger (École de technologie supérieure), Jean-Marc Mac-Thiong (Centre de recherche du CIUSSS-NÎM), Yvan Petit (École de technologie supérieure)▶ Vidéo
Les simulations numériques jouent un rôle croissant dans la recherche sur les traumatismes de la colonne cervicale et la conception d'outils chirurgicaux et de prothèses. Au sein des groupes de recherche, les simulations sont cependant limitées par l’utilisation d’un modèle construit autour d’un individu « moyen », généralement un homme trentenaire arbitrairement sélectionné, ne reflétant pas l’ensemble de la population. Cette limitation pourrait être mitigée par la création d’un catalogue de plusieurs modèles représentant la variabilité de la population, mais combien sont nécessaires et quelles sont leurs distinctions?
L’âge et le sexe des individus, ainsi que les données géométriques des vertèbres de leur colonne seront soumises à analyse par partitionnement de données afin d’en décrire et résumer la variabilité. Une méthode de prise de mesures automatiques de la géométrie des vertèbres est en phase finale de développement et sera utilisée sur une base de données de près de 400 individus reflétant notre population locale se présentant aux urgences à la suite d’un traumatisme. Enfin, un algorithme en phase avancée de développement permettra de générer le modèle de simulation de chaque profil afin de former le catalogue. Les résultats anticipés sont un catalogue de minimalement quatre profils types de sexes et de groupes d’âge, permettant ainsi de limiter les futurs biais de recherche et de conception.
-
Communication orale
Estimation 3D de la cinématique du rachis sous chargement traumatiqueNenkam Kanmangne (ÉTS - École de technologie supérieure), Catherine Laporte (École de technologie supérieure), Nicolas Bailly (Université Gustave-Eiffel), Yvan Petit (ÉTS - École de technologie supérieure)▶ Vidéo
L’incidence annuelle des lésions traumatiques du rachis cervical, causées par les accidents de la circulation, est de 4 à 17 / 100 000. Ces lésions sont la principale cause de paralysie chez les victimes, mais le manque de données expérimentales sur les mouvements intervertébraux lors d'un traumatisme limite la compréhension des mécanismes lésionnels. Cependant, instrumenter un rachis cadavérique avec des marqueurs cutanés ou des capteurs inertiels pour évaluer sa cinématique biaise celle-ci. Sans instrumentation du rachis, filmer la cinématique par ciné-radiographie n’offre qu’un suivi 2D des mouvements intervertébraux, rendant ambiguë l’évaluation des mouvements hors plan. Cette étude présente une méthode d’estimation 3D des mouvements intervertébraux. Elle consiste en un recalage 2D/3D entre la séquence d’images ciné-radiographiques (2D) et un modèle volumétrique du rachis utilisé pour créer un jumeau numérique (3D). L’estimation de la position des vertèbres est réalisée en minimisant l’erreur quadratique entre les images (réelle et jumeau numérique), au moyen de la fonction objectif adaptative de la matrice de covariance. Les résultats préliminaires obtenus ont une erreur moyenne en rotation hors plan de 1 degré. À terme, cette méthode permettra de caractériser in vitro les mouvements complexes des vertèbres lors de traumatismes, permettant de mieux comprendre les dommages mécaniques subis par les vertèbres dans des cas réels et d'améliorer la prise en charge des victimes.
Techniques, mesures et systèmes
-
Communication par affiche
Analyse cinématique du membre supérieur chez des personnes tétraplégiques à l'aide de capture vidéo sans marqueursAnne-Charlotte Desbarbieux (Polytechnique Montréal), Abolfazl Mohebbi (Polytechnique Montréal), Dorothy Barthélemy (École de réadaptation, Université de Montréal), Diana Zidarov (École de réadaptation, Université de Montréal), Marika Demers (École de réadaptation, Université de Montréal)▶ Vidéo Affiche
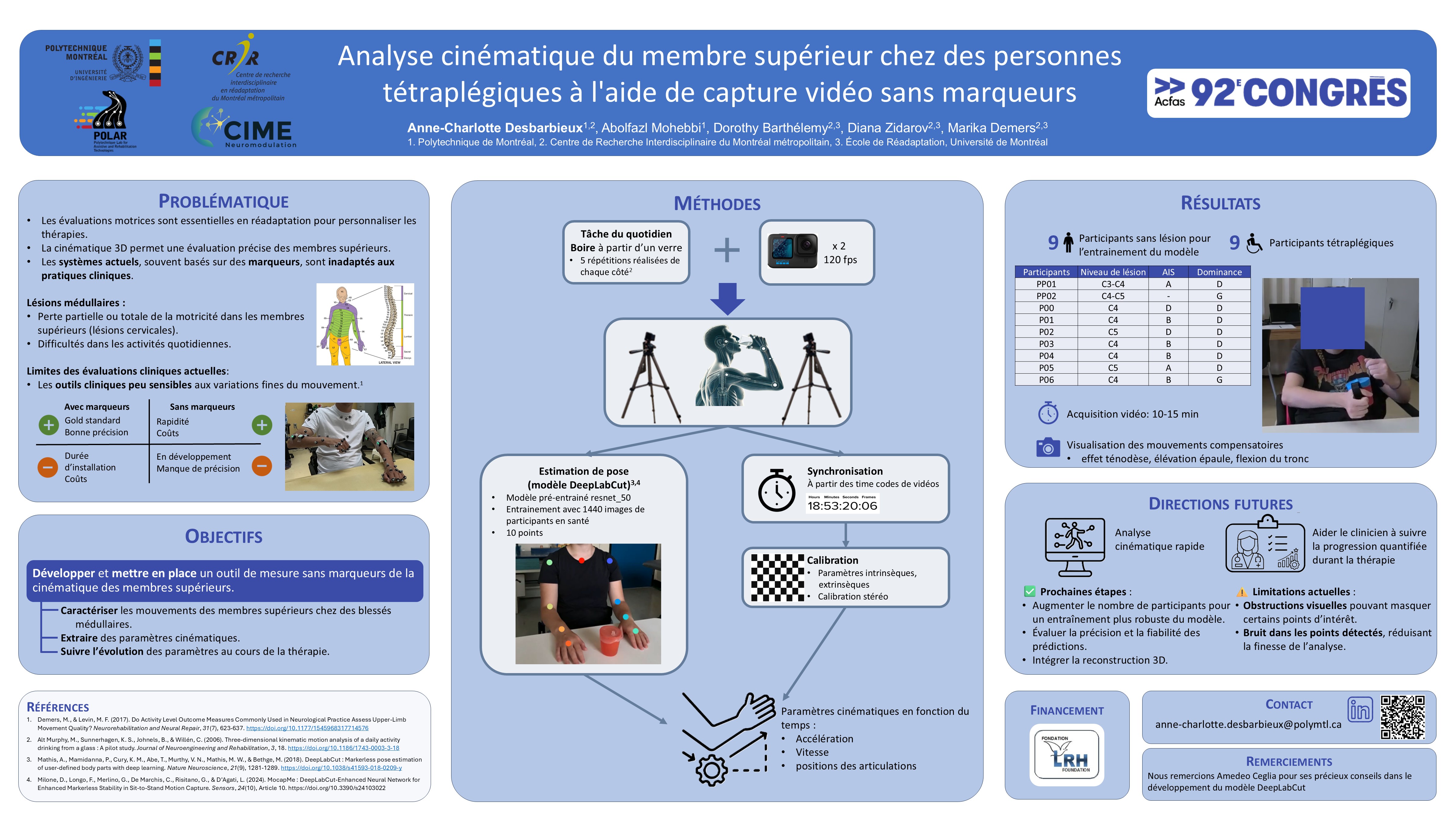
L'évaluation motrice est essentielle en réadaptation pour adapter et personnaliser les thérapies. La cinématique 3D permet la caractérisation des capacités motrices des membres supérieurs, offrant des données quantitatives précieuses pour bonifier les évaluations. Les systèmes de capture de mouvements actuels, nécessitant des marqueurs, sont complexes à mettre en place, coûteux et inadaptés pour les personnes tétraplégiques. L'objectif est de développer un système de capture de mouvement sans marqueur pour évaluer la récupération chez des personnes tétraplégiques.
Méthode
Environ une quinzaine de participants neurotypiques, et entre cinq et dix participants avec une tétraplégie sont recrutés. Nous utilisons deux caméras synchronisées pour capturer la tâche de boire à partir d’un verre. La détection de mouvement est faite avec un modèle DeepLabCut et une reconstruction 3D, préalablement entraînés sur les participants neurotypiques.Résultats
Les participants présentent une variété d'atteintes motrices. À partir des données vidéos, les caractéristiques cinématiques spatiales et temporelles sont extraites. Chez les participants tétraplégiques, la vitesse des mouvements est réduite par rapport aux participants neurotypiques. L'analyse des paramètres cinématique est en cours. Des informations sur le modèle seront offertes.Conclusion
La mise en place d’un système d’analyse de mouvement sans marqueurs permet de quantifier la récupération motrice durant la thérapie. -
Communication par affiche
Analyse technique et économique des équipements miniers souterrains : étude de casDavid Lauzon (ÉTS - École de technologie supérieure), Souheil-Antoine Tahan (École de technologie supérieure), Bruno Agard (École Polytechnique de Montréal), Michel Gamache (École Polytechnique de Montréal)Affiche
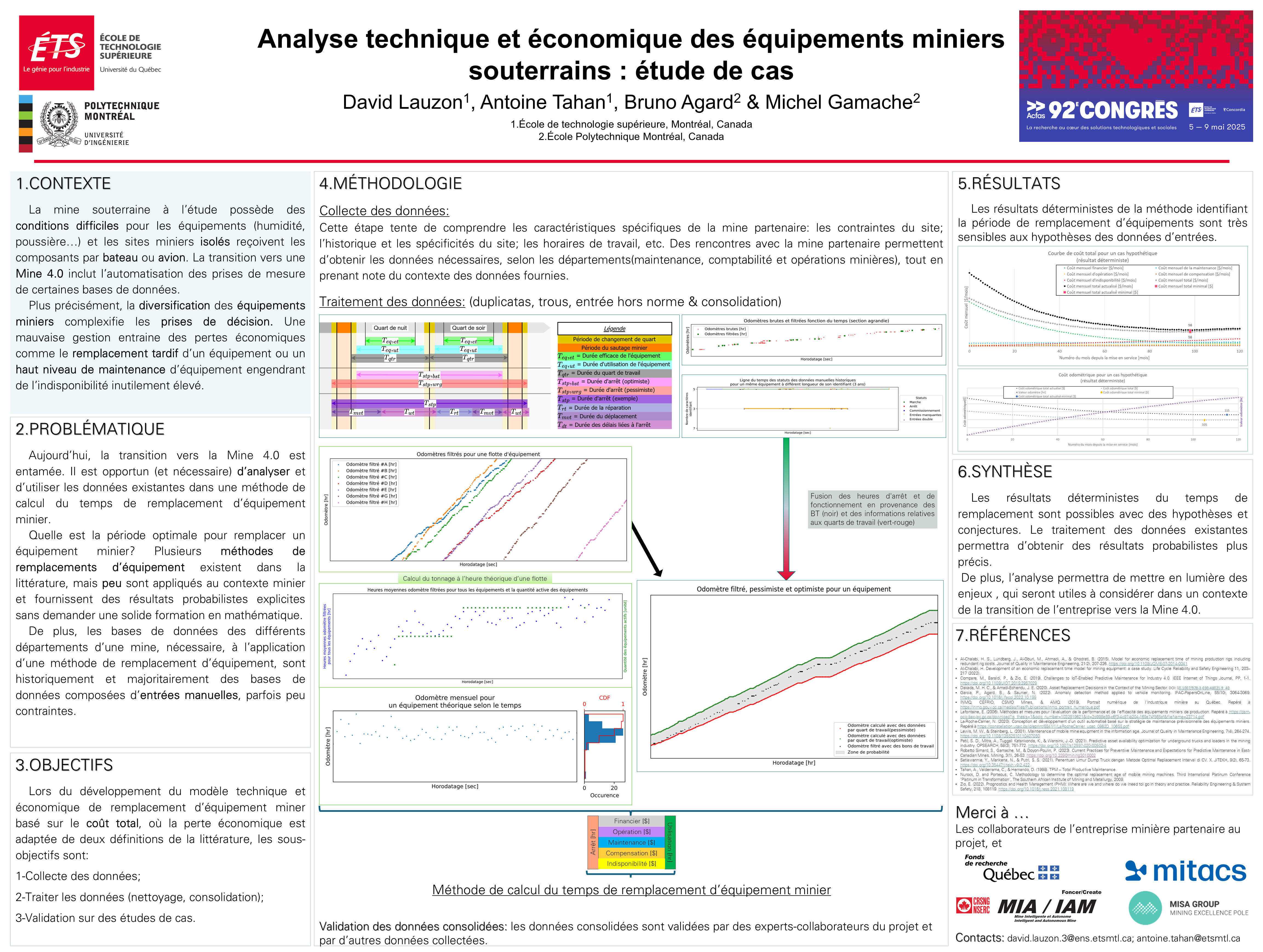
La diversité des équipements miniers complexifie la prise de décision sur les volets de maintenance et de gestion de flotte. Aujourd’hui, une problématique importante pour la gestion de la flotte dans le domaine minier est de déterminer, pour un risque donné, si un équipement mobile en activité et nécessairement usé peut encore répondre aux exigences en termes de fiabilité attendue et de taux de disponibilité comme établi par la production. Le projet présente une méthodologie qui permet de déterminer le temps optimal pour remplacer un équipement. En effet, un équipement remplacé trop tard pour des raisons d’amortissement financier peut engendrer des pertes de production considérables et des coûts de maintenance élevés. Au contraire, on risque d’obtenir un temps d’indisponibilité élevé si un équipement est souvent en arrêts pour de la maintenance.
Le but de ce projet de recherche est de proposer des outils d’aide à la décision aux gestionnaires, pour une flotte d’équipement ou d’un équipement minier spécifique. Pour développer ce type d’outil, nous explorons les données provenant de la maintenance et des opérations minières. Plus spécifiquement, les données de la maintenance de l’équipement combinées aux coûts d’indisponibilité permettent de quantifier un modèle probabiliste de fiabilité de l’équipement et les coûts qui y sont attachés. Les données des opérations minières récoltées permettront de compléter l'outil de la prise de décision avec les prévisions de la production.
-
Communication par affiche
Interaction humain-machine augmentée pour l'échographieGabrielle Roy (ÉTS - École de technologie supérieure), Vincent Lévesque (École de technologie supérieure), Ramy El-Jalbout (Centre hospitalier universitaire Sainte-Justine - Centre de recherche), Catherine Laporte (École de technologie supérieure)Affiche
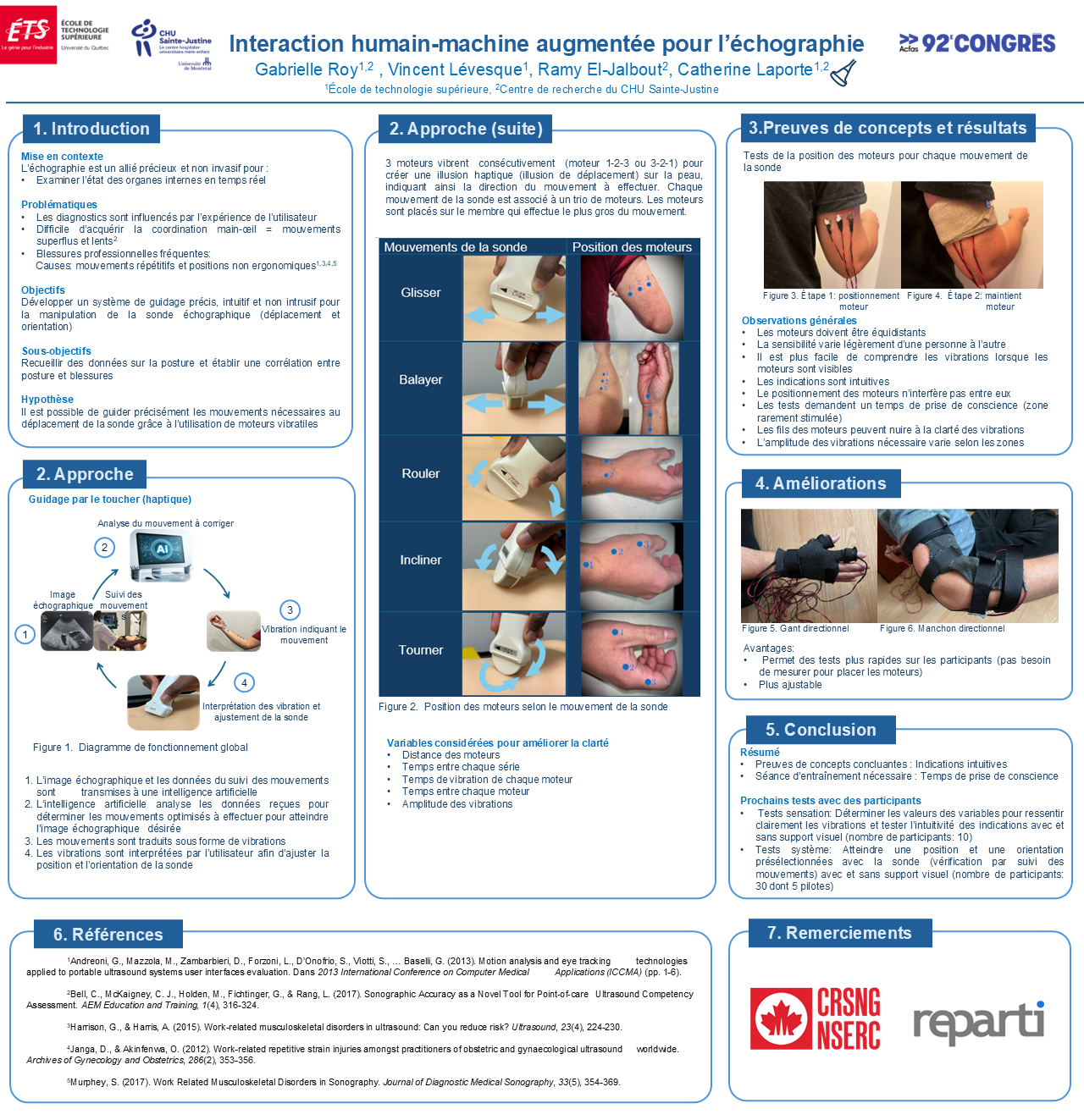
L'échographie est un outil non invasif qui permet de visualiser les organes en temps réel. Toutefois, la qualité des images dépend fortement de la maîtrise de la sonde, un défi pour les débutants en raison de la coordination et de l'expertise nécessaires. Il est donc essentiel d'améliorer leur formation. De plus, les échographistes sont exposés à des risques de blessures dues aux mouvements répétitifs et aux mauvaises postures, compromettant leur carrière. Afin de résoudre simultanément ces deux problèmes, ce projet propose le développement d’un système de guidage pour la manipulation de la sonde échographique, fournissant des indications tactiles par des moteurs vibratiles pour orienter le mouvement des doigts à l’épaule. Les moteurs sont placés de manière à rendre ces indications intuitives. En se basant sur des études existantes sur le guidage du bras global et les mouvements échographiques, la position théorique des moteurs a été définie. Pour la première validation, quelques personnes vont tester le prototype d’essai pouvant envoyer des indications pour deux mouvements échographiques. Ces essais vont permettre de vérifier de façon préliminaire et qualitative la clarté des indications.
-
Communication par affiche
Modélisation du frottement lors du tournage de l'alliage d’aluminium AA6061Sandrine Tina (ÉTS - École de technologie supérieure), Tahiana Andrianjakamanana (Ecole de Technologie Supérieure), Mohammad Jahazi (Ecole de Technologie Supérieure), Victor Songmene (Ecole de Technologie Supérieure)Affiche
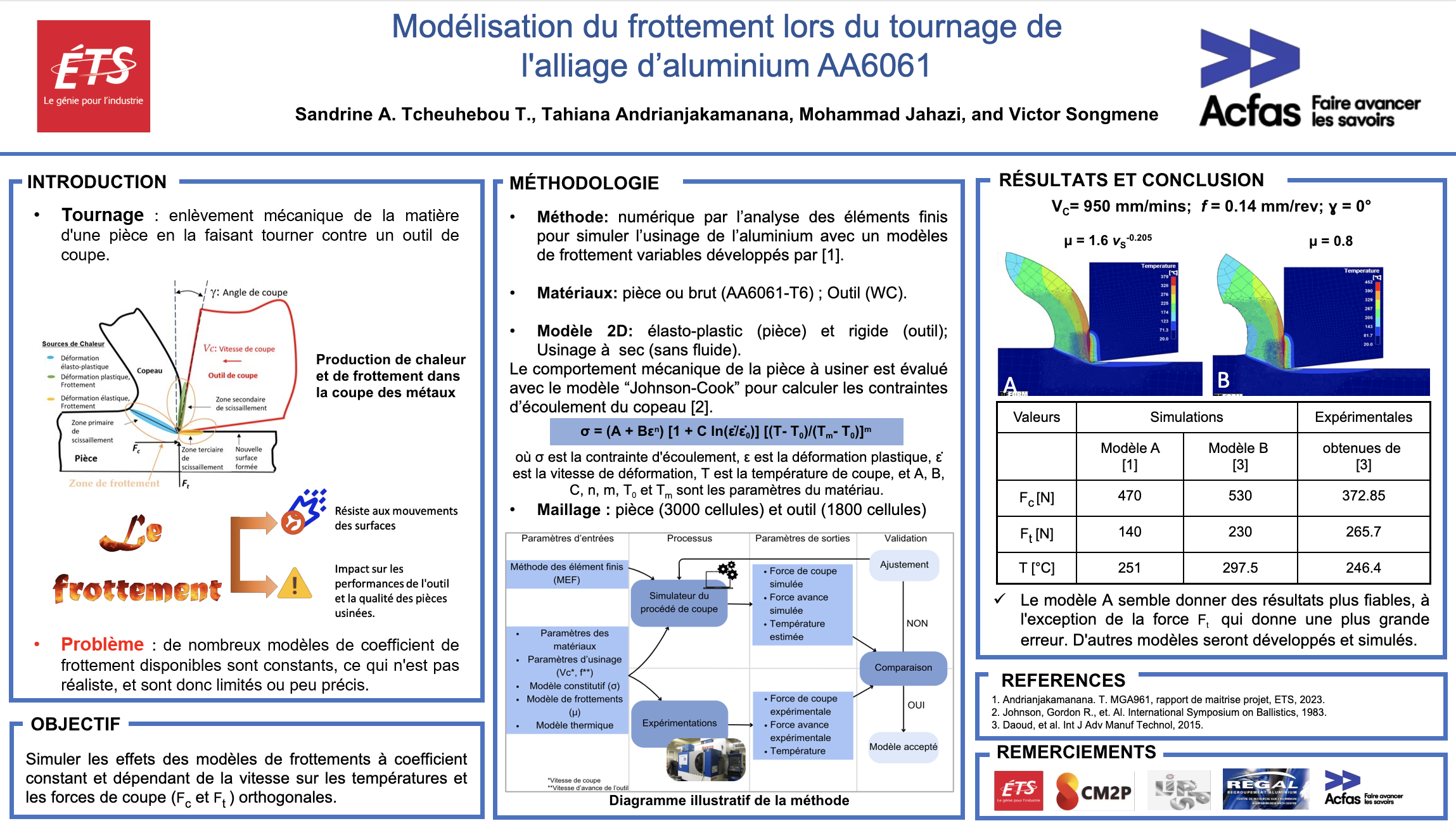
Le comportement des matériaux pendant l'usinage est affecté par de multiples facteurs, le frottement étant l'un des principaux. Le frottement aux interfaces de l'outil, du copeau et de la pièce à usiner peut entraîner des fluctuations des forces de coupe et des températures, affectant ainsi les performances de l'outil de coupe et l'intégrité de la surface des pièces usinées. Il est difficile de comprendre la physique du frottement et d'estimer avec précision le coefficient de frottement en raison de ses interactions avec l'environnement de coupe et les paramètres d'usinage. Cependant, la modélisation du frottement est essentielle pour prédire les indicateurs de performance de l'usinage. Cette étude consiste à simuler des modèles de frottement dépendant de la vitesse à l'aide de la méthode des éléments finis avec le logiciel DEFORM V.13.1 et à examiner leurs effets sur les températures et les forces de coupe. Une analyse comparative de ces modèles est menée pour évaluer leur performance prédictive.
{kind=link}
{kind=link}
{kind=link}
{kind=link}