
Informations générales
Événement : 92e Congrès de l'Acfas
Type : Domaine
Section : Section 200 - Sciences naturelles, mathématiques et génie
Description :Vous trouverez ici les communications libres du domaine Fabrication et construction. Dès le 28 avril 2025, vous pourrez voir les contributions en cliquant sur le bouton éponyme. Connectez-vous à votre compte utilisateur si vous souhaitez laisser un commentaire ou poser une question.
Dates :- Gauthier Alfonsi (Acfas)
Programme
Toute la semaine
Fabrication et construction
-
Communication orale
La modélisation chronographique pour la construction des projets de bâtimentsAdel Francis (ÉTS - École de technologie supérieure)▶ Vidéo
Dans les projets de construction des bâtiments, une gestion inefficace des ressources, sans tenir compte de l'emplacement de travail, peut entraîner des échéanciers non validés. Les ressources ne peuvent pas être utilisées, même si elles sont disponibles, au-delà de la capacité du site, afin de prévenir la congestion des zones de travail qui pourrait nuire à la circulation des personnes et des matériaux et réduire la productivité. Les méthodes de planification traditionnelles mettent l'accent sur les tâches et les contraintes, négligeant souvent la gestion des espaces, la circulation et l'approvisionnement. L'objectif principal de cette communication est de présenter la planification spatio-temporelle comme un modèle d'ordonnancement permettant de simuler simultanément la planification des activités, des ressources et des espaces. Cette approche vise à garantir une modélisation linéaire des opérations de construction et à assurer une rotation adéquate de la main-d'œuvre entre les différents espaces. La représentation dynamique du taux d'occupation du chantier assurera une utilisation équilibrée des espaces tout au long du projet.
Fabrication et construction
-
Communication par affiche
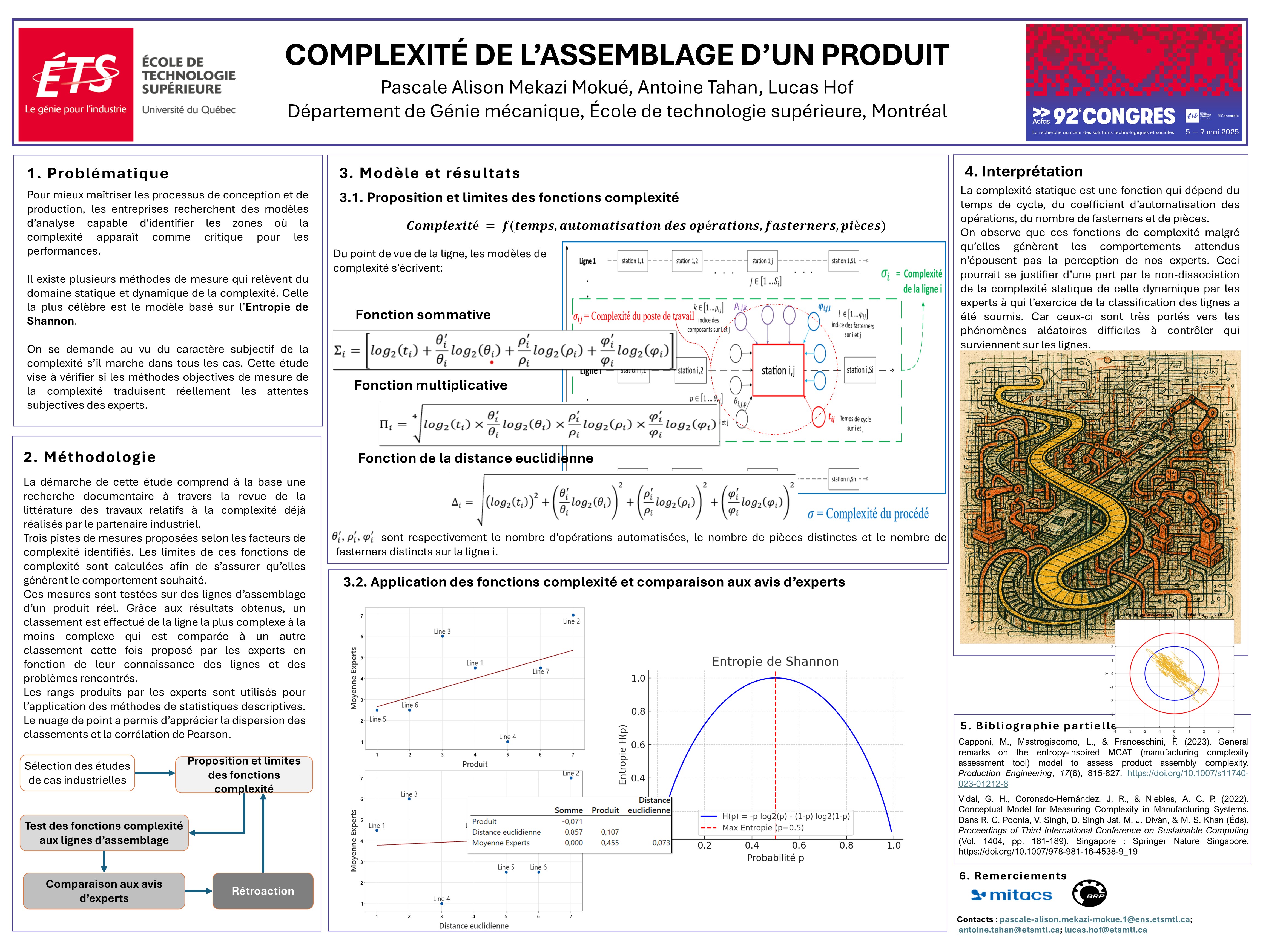
Complexité de l'assemblage d'un produitPascale Alison Mekazi (ÉTS - École de technologie supérieure), Antoine TAHAN (Ecole de Technologie Supérieure), Lucas HOF (Ecole de Technologie Supérieure)Affiche
Dans un environnement économique hautement concurrentiel, les concepts de customisation et de personnalisation de masse traduisent la volonté des organisations à répondre au mieux aux attentes de clients. Cela conduit à une complexité accrue dans la conception des produits et les systèmes manufacturiers qui engendre des coûts. Dans l’optique de réduire ces coûts de complexité, les entreprises recherchent des modèles d’analyse capable d'identifier les zones où cette complexité apparaît le plus.
La complexité du poste de travail intègre les aspects physiques et fonctionnels des tâches à accomplir, y compris le facteur humain. Les méthodes populaires de la dynamique non linéaire et la théorie de l’information s’intéressent essentiellement à la structure du produit ou du procédé manufacturier. Cependant, des approches de l’ergonomie des facteurs humains vont rechercher la perception de l’opérateur au moyen des questionnaires structurés. Les mesures quantitatives proposent généralement des métriques qui ciblent un aspect spécifique de la complexité par le dénombrement des modules ou pièces au sein des familles de produits, des interfaces utilisées, du nombre d’opérations. Ainsi, ce projet vise à développer un indicateur de complexité qui conjugue divers aspects de complexité afin d’aider les organisations à la prise de décision.
-
Communication par affiche
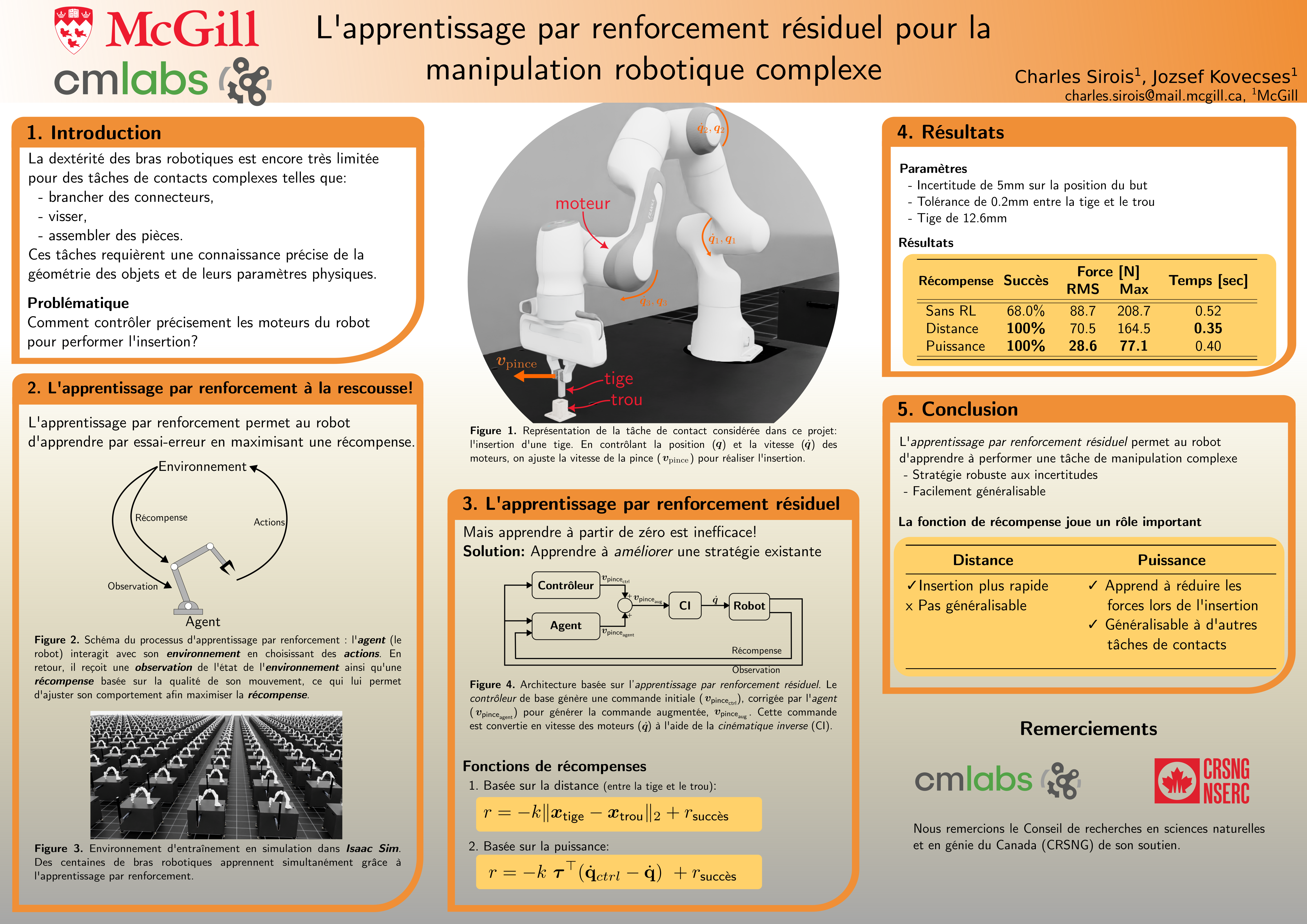
L'apprentissage par renforcement résiduel pour la manipulation robotique complexeCharles Sirois (Université McGill), Jozsef Kovecses (McGill)Affiche
Grâce à leur fiabilité et précision, les bras robotiques sont devenus des outils essentiels dans un large éventail d'industries québécoises. Cependant, ils rencontrent encore des difficultés dans l'exécution de tâches complexes impliquant la manipulation d'objets, telles que l'insertion de pièces dans des assemblages ou le vissage de boulons. Ces opérations exigent une coordination fine et une sensibilité aux forces externes, ce qui est difficile à modéliser avec précision.
Ce projet vise à rendre les bras robotiques encore plus polyvalents en leur permettant d'exécuter des manipulations complexes. Pour ce faire, nous utiliserons le Residual Policy Learning, une méthode d'apprentissage par renforcement où le robot n'apprend pas la tâche de zéro, mais améliore une stratégie existante.
Dans un premier temps, le robot sera entraîné en simulation pour exécuter l'insertion d'une tige. L'apprentissage en simulation permet de minimiser les risques de défaillance avant l'implémentation dans le monde réel. Ensuite, la stratégie apprise sera transférée sur un bras robotique réel. Les résultats préliminaires indiquent que la méthode proposée surpasse, en simulation, les approches traditionnelles. Le bras robotique apprend à effectuer la tâche avec plus de précision et moins de force, réduisant les risques de dommage matériel.
Cette recherche constitue une avancée vers la réalisation de tâches d'assemblage complexes par des robots, ouvrant la voie à leur plus grande intégration en industrie.
{kind=link}
{kind=link}